PID精讲
PID精讲
(该文章是本人对视频的个人整理笔记,如有侵权请联系我进行删除)
引入
假设一个工人控制水阀,使水流量稳定,工人可以看到并知道水流量为1L/s。某时刻,水管破裂,流量变为0.9L/s,工人通过控制水阀使得流量恢复到1L/s。之后,工厂要求水流达到2L,工人通过观察并控制水阀使得水流量为2L/s。
在上面的例子中,工人起到的作用如下:
- 稳定流量
- 改变流量
- 检测流量
PID可以理解为代替工人作用的工具。
适用系统
适用于二阶及以内的线性系统
线性系统性质(信号与系统)(卡尔曼滤波):
- 齐次性(设y=f(x),在x变为kx时,y变为ky)
- 叠加性 (设y1=f(x1),设y2=f(x2),y1+y2=f(x1)+f(x2)=f(x1+x2))
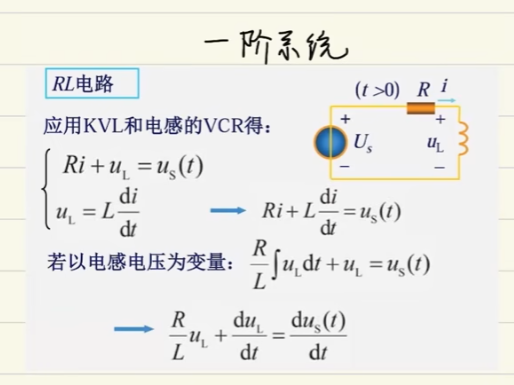
一阶系统
二阶系统
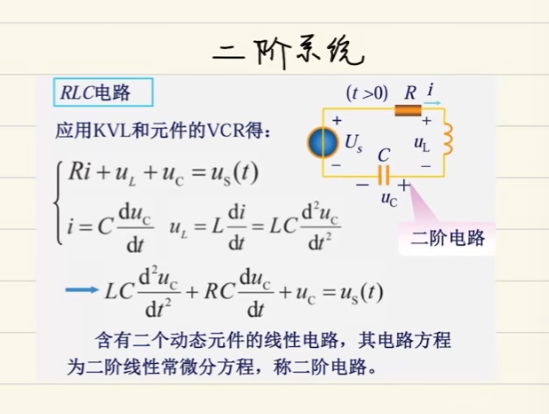
宏观意义
开环控制系统

PID 为其中的控制器,接收期望值,发出动作信号给执行器。可以类比上文的工人控制水阀的情况。
前馈控制系统
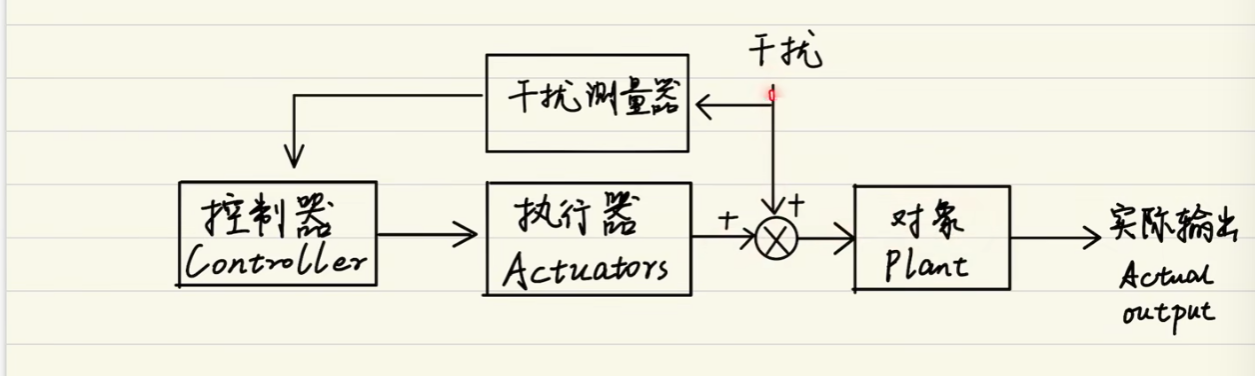
PID 为其中的控制器,接收期望值,发出动作信号给执行器。可以类比上文的水管漏水后工人控制水阀的情况。
闭环控制系统
单闭环
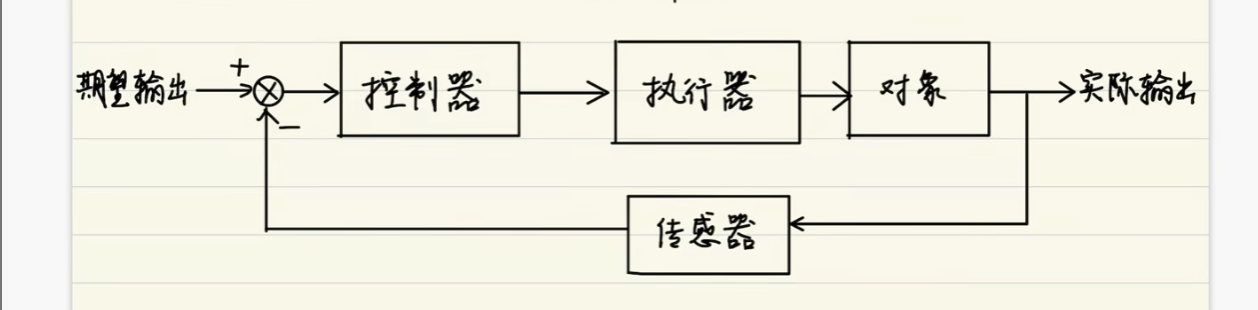
实际输出会返回并与期望输出进行对比得到一个偏差值E,E随后给到对象进行偏差的补偿。可以类比上文的水管漏水后工人控制水阀的情况(闭环)
双闭环
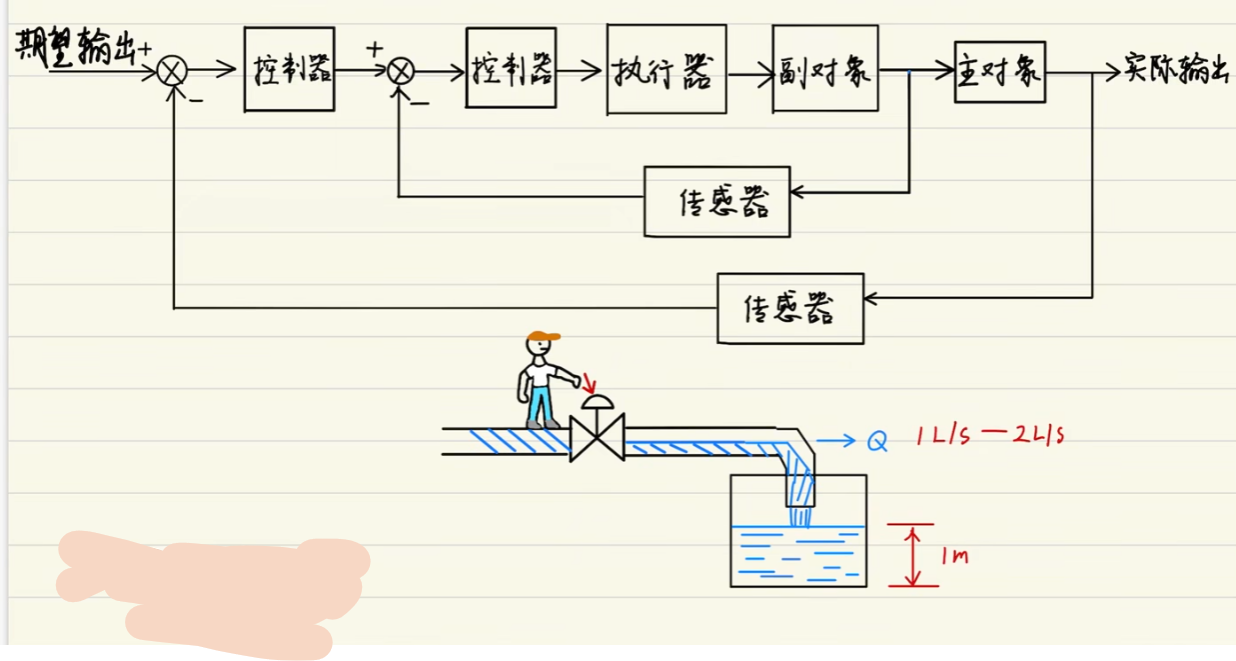
控制目标为水箱内水高1m,副对象为水流,主对象为水箱里的水的高度。
期望输入为水箱内水高度。
可以理解为在现实中放一定量的水,是要通过控制水流的大小以放出我所需要的水量。
PID公式理解(视频p4)
PID调参
仿真:Webpack App (rossning92.github.io)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 幻想科学道具研究所!